Instalación y puesta en marcha del brazo robot OpenMANIPULATOR-X
Instalar la maquina virtual del siguiente enlace para tu ordenador, sigue los pasos para tu sistema operativo en concreto.
https://www.mathworks.com/support/product/robotics/ros2-vm-installation-instructions-v6.html
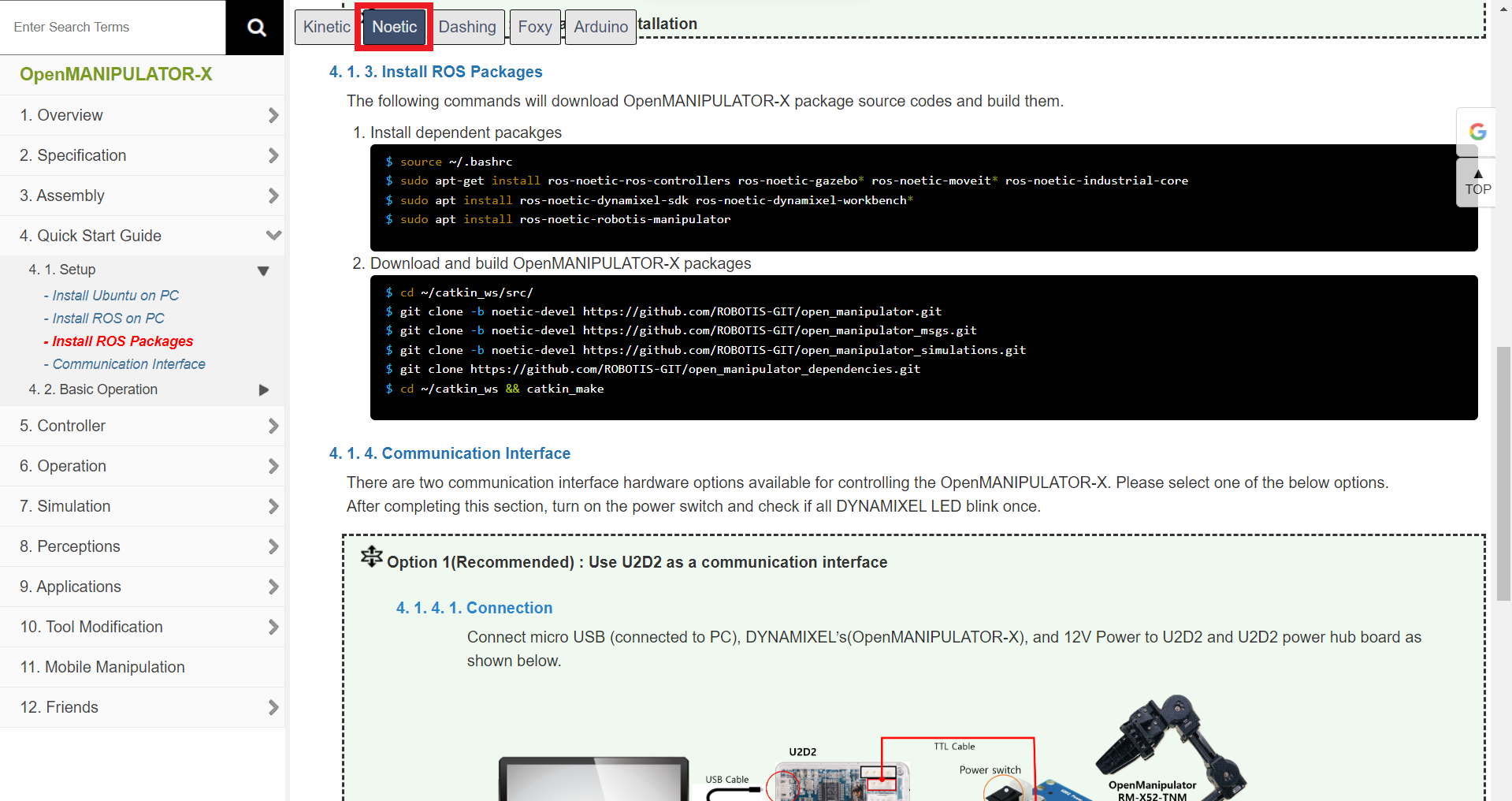
Ahora vamos a instalar los archivos necesarios para la ejecución de la simulación del brazo robótico. Ten cuidado, debes seleccionar la pestaña superior de Noetic!! Abre una terminal y realiza los pasos 1 y 2.
Al abrir un terminal hay que añadir
source /opt/ros/noetic/setup.bash