Instalación y puesta en marcha del brazo robot OpenMANIPULATOR-X
Instalar la maquina virtual del siguiente enlace para tu ordenador, sigue los pasos para tu sistema operativo en concreto.
https://www.mathworks.com/support/product/robotics/ros2-vm-installation-instructions-v6.html
Ahora hay que instalar algunos paquetes que faltan para la compilación
Al abrir un terminal hay que añadir
source /opt/ros/noetic/setup.bashPara instalar los paquetes que puedan faltar utilizamos los siguientes comandos:
sudo apt-get update
sudo apt-get install ros-noetic-joy ros-noetic-teleop-twist-joy ros-noetic-teleop-twist-keyboard \\
ros-noetic-laser-proc ros-noetic-rgbd-launch ros-noetic-depthimage-to-laserscan ros-noetic-rosserial-arduino \\
ros-noetic-rosserial-python ros-noetic-rosserial-server ros-noetic-rosserial-client ros-noetic-rosserial-msgs \\
ros-noetic-amcl ros-noetic-map-server ros-noetic-move-base ros-noetic-urdf ros-noetic-xacro \\
ros-noetic-compressed-image-transport ros-noetic-rqt-image-view ros-noetic-gmapping ros-noetic-navigation \\
ros-noetic-interactive-markerscd ~/catkin_ws/src/
git clone -b noetic-devel https://github.com/ROBOTIS-GIT/turtlebot3.git
git clone -b noetic-devel https://github.com/ROBOTIS-GIT/turtlebot3_msgs.git
git clone -b noetic-devel https://github.com/ROBOTIS-GIT/turtlebot3_simulations.git
cd ~/catkin_ws && catkin_make
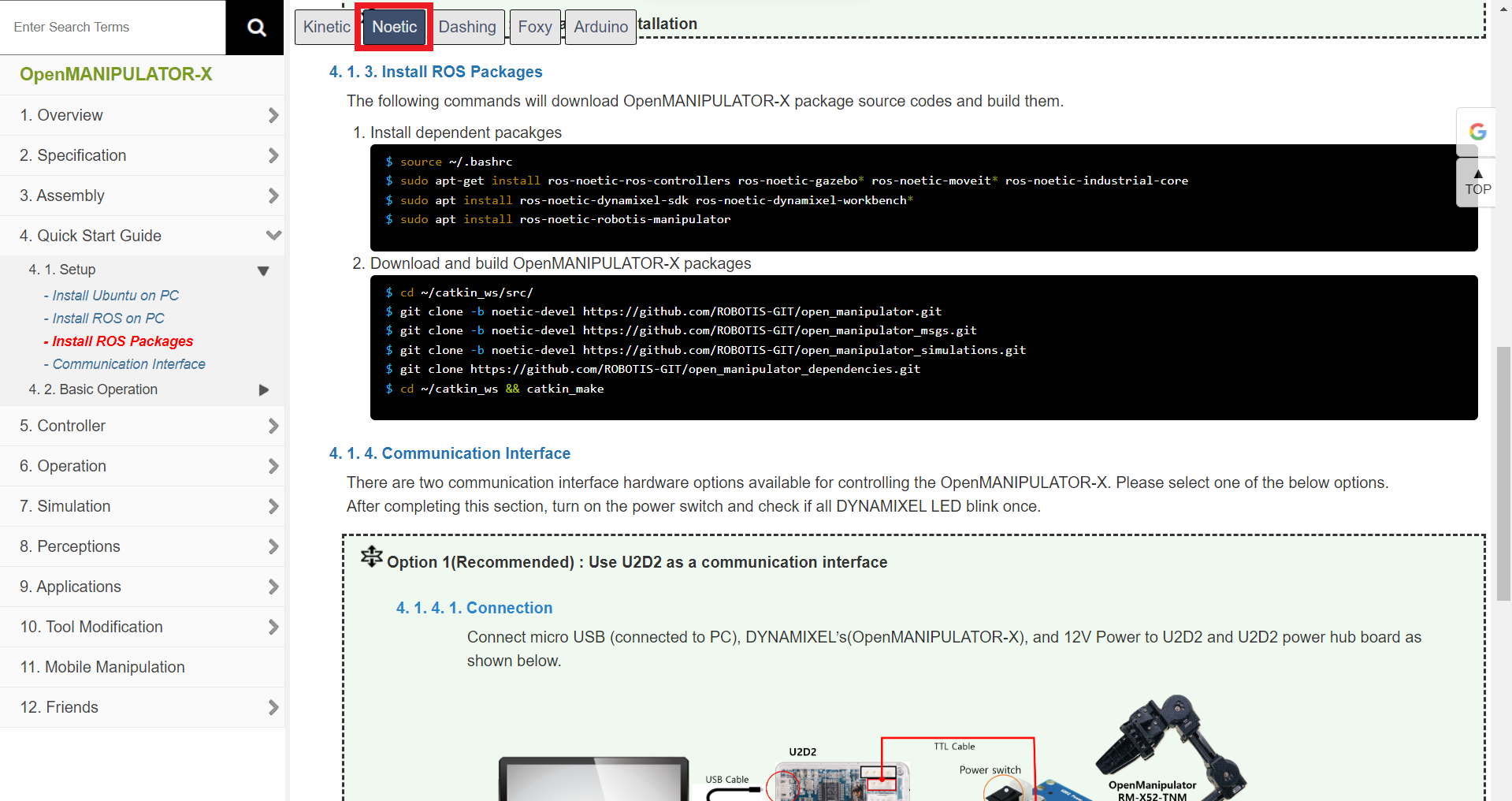
Ahora vamos a instalar los archivos necesarios para la ejecución de la simulación del brazo robótico. Ten cuidado, debes seleccionar la pestaña superior de Noetic!! Abre una terminal y realiza los pasos 1 y 2.